Research
多入出力温度制御系設計法
研究課題:データ駆動制御による複数制御器を有する制御系の設計法
制御システム設計では, 制御対象の数学モデルを導出し, そのモデルに基づいて制御器を設計する方法が一般的です。
モデルの導出には, 物理法則に基づく第一原理モデリングや, 入出力データに基づくシステム同定などがあります。
しかし,多入出力温度制御系や多軸ロボットのような複雑なシステムでは, モデル構築が困難である場合があります。
このような背景から, モデルを用いず入出力データから直接制御器を設計する データ駆動制御が提案されています。
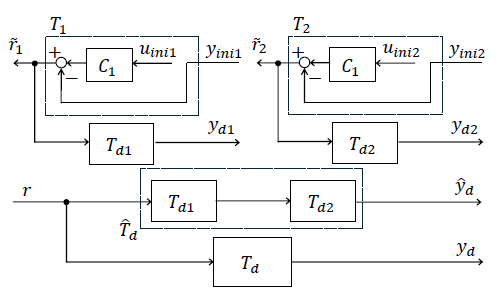
本研究では, 複数の制御器を有するシステムに対するデータ駆動制御手法を検討し, E-FRIT(Extended Fictitious Reference Iterative Tuning)を拡張した手法を提案しています。
数値例により提案手法の有効性を検証しています。
Research Topics