MIMO Temperature Control System Design
Research Topic: Data-Driven Design of Control Systems with Multiple Controllers
In control system design, deriving a mathematical model of the plant and designing a controller based on that model is a common approach.
Such models can be obtained through first-principle modeling or system identification using input-output data.
However, for complex systems such as MIMO temperature control systems, constructing an accurate model can be difficult.
Therefore, data-driven control methods have been proposed, which design controllers directly from data without explicit modeling.
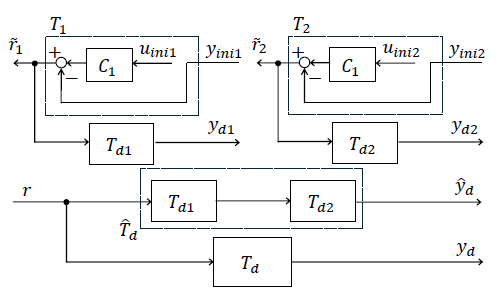
This research focuses on extending data-driven control to systems with multiple controllers.
In particular, we propose an extension of the E-FRIT method and demonstrate its effectiveness through numerical examples.